超精密驱动技术是实现纳米定位和纳米操纵的基本途径,涉及多向线性运动和定向旋转运。就超精密旋转运动而言,通过基于压电或磁致伸缩的尺蠖运动、寄生运动和粘滑运动等,已经很好地理解和解决了与线性运动相关的基本物理问题,但克服驱动器大行程和高精度之间的矛盾仍是极具挑战性的,这归因于转动体不可避免的机械惯性和反向回退。因此,在确保连续旋转的前提下,大幅提高旋转驱动精度和步进定位精度至关重要,特别是考虑到以纳米操作机器人为代表的前沿和新生领域对定位精度日益提高的要求。

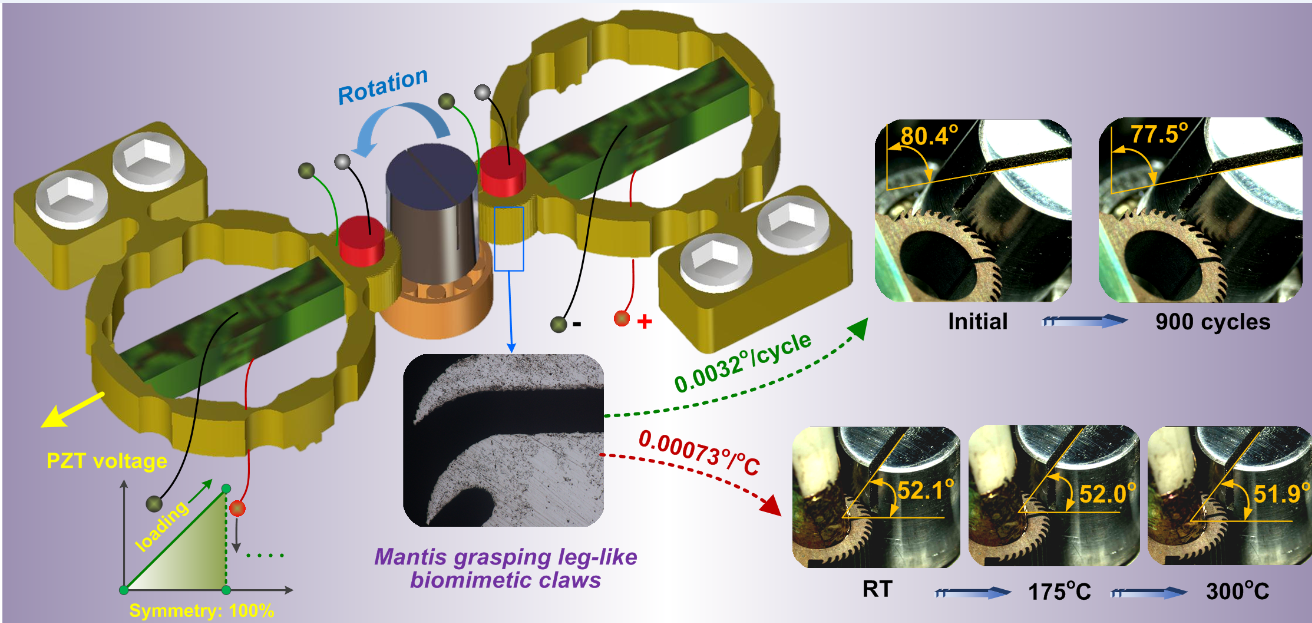
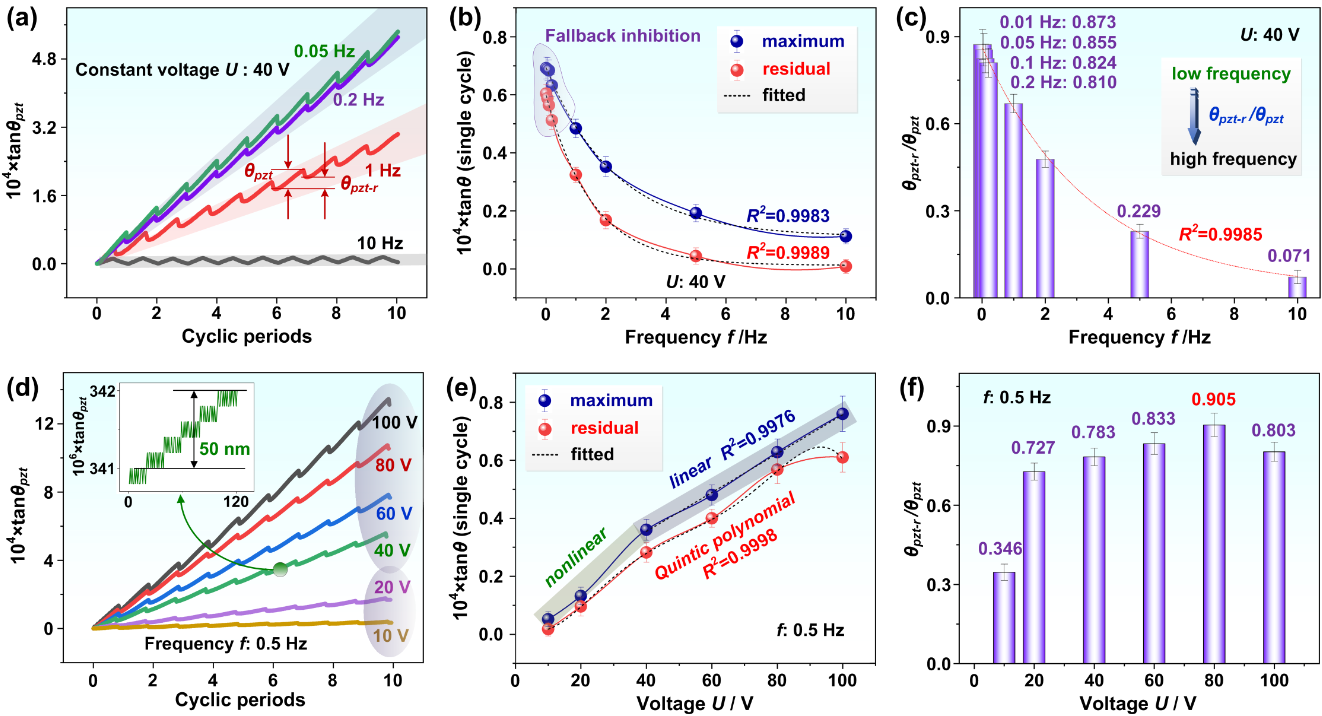
近期,永利集团3044am官方入口赵宏伟教授团队在超精密驱动器方面取得新进展。基于仿生粘滑运动原理,研制了一种新型压电-热耦合双向旋转驱动器。该驱动器通过螳螂前足式仿生爪和加热组件可以分别实现由压电粘滑和热膨胀效应产生的顺时针宏观旋转和逆时针回退。在相对较低的频率和较高的电压下,旋转回退被有效抑制。基于三维光学成像对顺时针缓慢粘滞和逆时针瞬时粘滞过程的实时观测,试验揭示了0.2μrad的压电驱动旋转分辨率和0.00073o/oC的热诱导微观分辨率。
论文受国家自然科学基金(51875241)、国家重点研发计划项目(2018YFF010124)和吉林省科技发展计划项目(20190302078GX, YDZJ202101ZYTS129)的资助,以题为“Piezoelectric-thermal coupling driven biomimetic stick-slip bidirectional rotary actuator for nanomanipulation”发表在国际知名期刊Nano Letters (2020 IF:11.188)上。工程仿生教育部重点实验室任露泉院士给予了理论指导,赵宏伟教授和马志超教授为论文的共同通讯作者,马志超教授为论文第一作者,一年级硕士生熊俊名和本科生李傢楷参与了论文的试验工作。